Leap Motionのサンプルについて
紙袋 2014/12/19(Fri) 17:01
Siv3D使わせてもらってます。
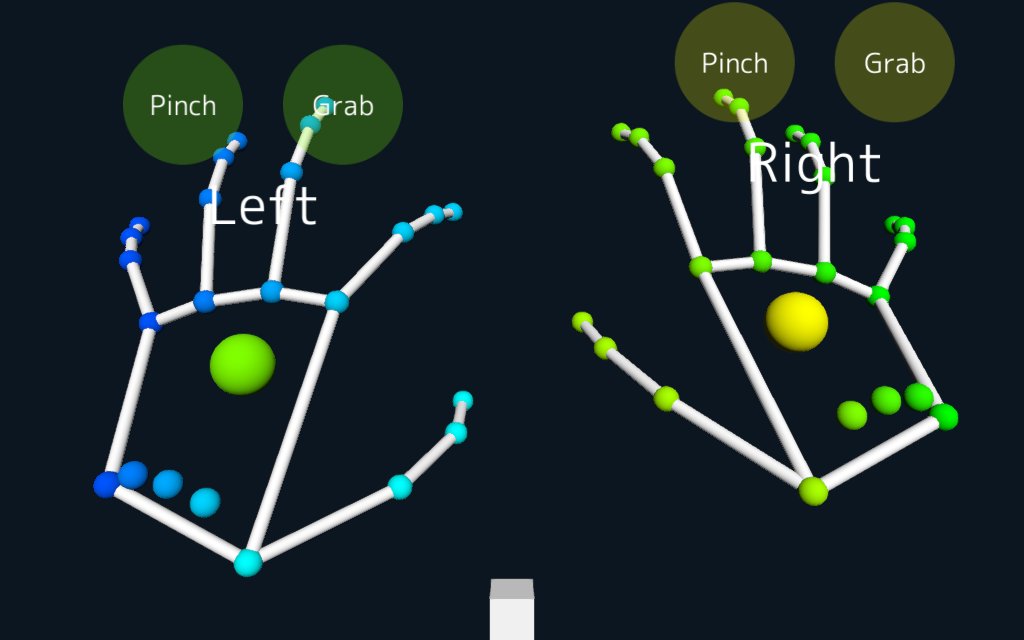
LeapMotionのサンプルで各球体の間をCylinderで繋げて、より手の形に近い描画にしたいと思っています。
※Leap Motionの標準にある、ビジュアライザーのような感じです。
ですが、3次元上の任意の点と点の間に対するCylinderの長さや位置を求めるのは出来たのですが、回転量の数値を求める方法が分かりません。
どのようにすればよいのでしょうか?
Reputeless 2014/12/19(Fri) 17:48
2 つの Vec3 をつなぐ Cylinder を作成する Stick() 関数を作り、
Leap Motion v2 サンプルを改造するとこうなります。
# include <Siv3D.hpp>
# include <Siv3DAddon/LeapMotion.hpp>
Cylinder Stick(const Vec3& from, const Vec3& to, double r = 0.1)
{
const Vec3 v = to - from;
const double length = v.length();
if (!length)
{
return Cylinder(0.0, 0.0);
}
const Vec3 direction = v / length;
const auto rotation = Quaternion::RotationArc(Vec3::Up, direction);
return Cylinder(from, r, length, rotation).moveBy(direction*length*0.5);
}
void Main()
{
Window::Resize(1024, 640);
LeapMotion::RegisterAddon();
const Font font(36), font2(18);
while (System::Update())
{
Graphics3D::FreeCamera();
for (const auto& hand : LeapMotion::Hands())
{
const Vec3 scaledPos = hand.pos*0.05;
Sphere(scaledPos, 0.5).draw(HSV(hand.id * 30).toColor());
const Vec2 screenBase = Graphics3D::ToScreenPos(scaledPos).xy;
font(hand.isLeft ? L"Left" : L"Right").drawCenter(screenBase.movedBy(20, -160));
const Circle pinchCircle(screenBase.movedBy(-60, -260), 60);
const Circle grabCircle(screenBase.movedBy(100, -260), 60);
pinchCircle.draw(HSV(hand.id * 30).toColor(60));
pinchCircle.drawPie(0.0, hand.pinchStrength * TwoPi, HSV(hand.id * 30));
grabCircle.draw(HSV(hand.id * 30).toColor(60));
grabCircle.drawPie(0.0, hand.grabStrength * TwoPi, HSV(hand.id * 30));
font2(L"Pinch").drawCenter(pinchCircle.center);
font2(L"Grab").drawCenter(grabCircle.center);
for (const auto& finger : hand.fingers)
{
for (const auto& joint : finger.joints)
{
Sphere(joint*0.05, 0.2).draw(HSV(finger.id * 10).toColor());
}
const int begin = (finger.type == LeapMotion::FingerType::Thumb)
|| (finger.type == LeapMotion::FingerType::Pinky) ? 0 : 1;
for (int i = begin; i < 4; ++i)
{
Stick(finger.joints[i] * 0.05, finger.joints[i + 1] * 0.05).draw();
}
}
for (int i = 0; i < Min<int>(4, hand.fingers.size()); ++i)
{
Stick(hand.fingers[i].joints[1] * 0.05, hand.fingers[i + 1].joints[1] * 0.05).draw();
}
Stick(hand.fingers[0].joints[0] * 0.05, hand.fingers[hand.fingers.size() - 1].joints[0] * 0.05).draw();
}
Box(0, 0, 0, 1).draw();
}
}
紙袋 2014/12/20(Sat) 13:41
サンプルプログラムありがとうございます。
関数の処理の確認なんですが、
Quaternion::RotationArc()
は、引数の2つのベクトルがなす角度を返すという解釈でよろしいでしょうか?
(今回の場合は、y軸方向に対するベクトルと、二点間の線分のベクトルがなす角度)
moveBy()
は、引数に渡された移動量分、座標を移動するという解釈でよろしいでしょうか?
(今回の場合は、二点間の中点の位置に移動)
よろしくお願いします。
Reputeless 2014/12/20(Sat) 15:33
[1] ×
Quaternion::RotationArc() は単位方向ベクトル v1 を別の単位方向ベクトル v2 に回転させるための
クォータニオンを返します。
サンプルプログラムでは、Vec3::Up を向いている Cylinder を棒の向きに回転させるために
Quaternion::RotationArc() を使っています。
[2] ○
moveBy() は図形の位置を、指定した分だけ移動させます。
初心者LEAP 2015/07/27(Mon) 17:35
Siv3Dで手の座標を取得して表示するしたいと思っています。
どのようにすればよいでしょうか
Reputeless 2015/08/29(Sat) 05:29
Visual Studio で <Siv3DAddon/LeapMotion.hpp> を開くとクラスの説明が書かれています。
http://play-siv3d.hateblo.jp/entry/jp/example/leapmotionV2 では Vec3 型の joint が各関節の座標です。
値は Println や PutText, Font で表示できます。